Subproject A02
Subproject A02
Holographic 6D Wireless Locating and Motion Tracking
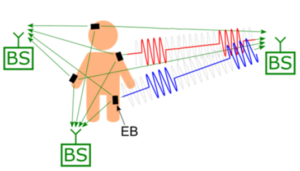
A02 Sub-Project describes the development of a wireless radar localization system for human pose estimation. The goal is to track the full body with an update rate of up to 10 kHz in 6D (position and orientation) with millimeter accuracy. Therefore, wireless transmitters (‚beacons‘) with low hardware complexity are positioned on the human body. These are equipped with sensors, e.g., electromyography or an inertial measurement unit (IMU), to gather additional information required for a comprehensive analysis. This data is transmitted simultaneously over the same radar signal, inherently linking measured data with positioning. Thus, no extra synchronization is required—a problem often encountered in a multi-sensor setup. The localization is achieved using the Holographic Extended Kalman Filter, which compares the phase of the RF signal at large apertures with expected phases to determine the sender’s position. Alongside IMU data, the absolute orientation is also determined, significantly enhancing its diagnostic value.
Contacts

Additional Information
- Balbach S., Kolpak J., Dorn C., Brückner S., Schlechtweg N., Gambietz M., Koelewijn A., Vossiek M., Hagelauer A.:
A Miniaturized Flexible Surface Electromyography Sensor With an Integrated Localization Concept.
IEEE Microwave Magazine 26 (2025), S. 47-59. ISSN: 1527-3342. DOI: 10.1109/MMM.2024.3494717. - Mayer K., Lotter S., Shanin N., Brückner S., Vossiek M., Cottatellucci L., Schober R.:
Optimal Transmit Signal and Beamforming Design for Integrated Sensing and Power Transfer Systems.
IEEE Open Journal of the Communications Society (2025), S. 1-1, ISSN: 2644-125X. DOI: 10.1109/OJCOMS.2025.3546806. - , , , , , , , :
Joint Transmit Signal and Beamforming Design for Integrated Sensing and Power Transfer Systems.
IEEE International Conference on Communications (2024). DOI: 10.1109/ICC51166.2024.10622740. - Pitzal M., Mücke A., Bräunig J., Brückner S., Richer R., Schlechtweg N., Albrecht NC., Koelpin A., Eskofier B., Vossiek M.:
Open Sync Board – An open-source tool for hardware synchronization of multimodal physiological sensor setups.
Journal of Open Hardware 8 (2024). ISSN: 2514-1708. - Rückert R., Herglotz C., Sura O., Ninov Y., Kaup A., Vossiek M.:
Combining Run-Length Encoding Preprocessing With Lempel-Ziv-Markov Algorithm to Enhance Compression for Automotive Radar Data.
2025 16th German Microwave Conference (GeMiC) (Dresden, Germany, 17 März 2025 – 19 März 2025). DOI: 10.23919/GeMiC64734.2025.10979136. - Rückert R., Li Y., Herglotz C., Sura O., Kaup A., Vossiek M.:
Compression of Preprocessed Automotive Radar Data by Using Context-Adaptive Binary Arithmetic Coding.
2024 21st European Radar Conference (EuRAD) (, 25 September 2024 – 27 September 2024). DOI: 10.23919/EuRAD61604.2024.10734958. - , , , , :
Time-Synchronized Joint Communication and Precise Wireless Localization of Multiple On-Body Sensor Nodes for Human Gait and Movement Measurement.
Asilomar Conference on Signals, Systems, and Computers (Pacific Grove, 2024). - , , , , :
An Initialization Method for Ultra-Precise Holographic Wireless Local Positioning.
20th European Radar Conference (EuRAD) (Berlin, 2023). DOI: 10.23919/EuRAD58043.2023.10289364. - , , , , , , , , , , :
A Wireless Joint Communication and Localization EMG-Sensing Concept for Movement Disorder Assessment.
IEEE Journal of Electromagnetics, RF and Microwaves in Medicine and Biology (2023), S. 1-10. ISSN: 2469-7249. DOI: 10.1109/JERM.2023.3321974. - , , , , , , , , :
Quasi-Coherent Phase-Based Localization and Tracking of Incoherently Transmitting Radio Beacons.
IEEE Access 9 (2021), S. 133229-133239. ISSN: 2169-3536. DOI: 10.1109/ACCESS.2021.3115563.